基于多尺度网格细胞到位置细胞的仿生 SLAM 算法
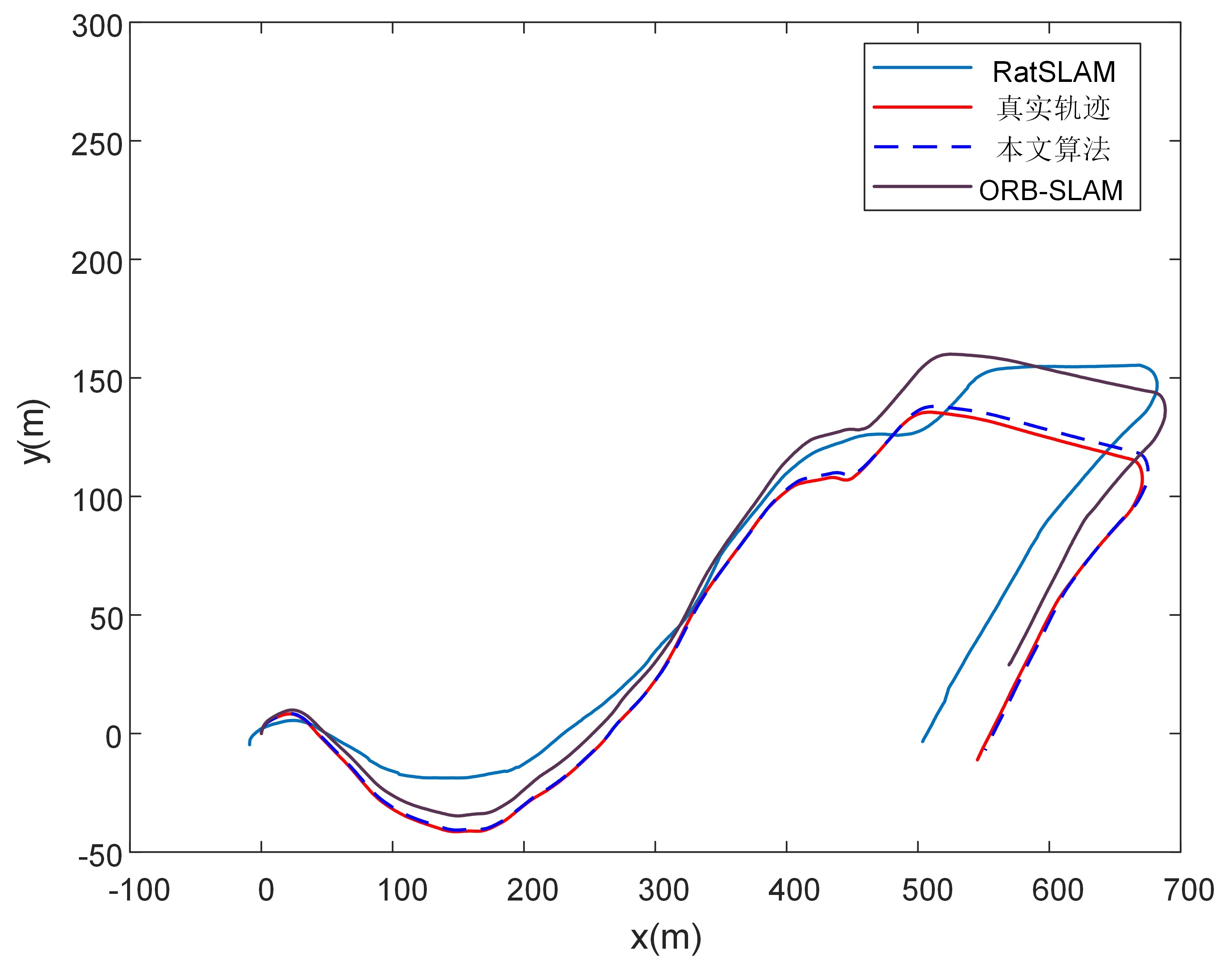
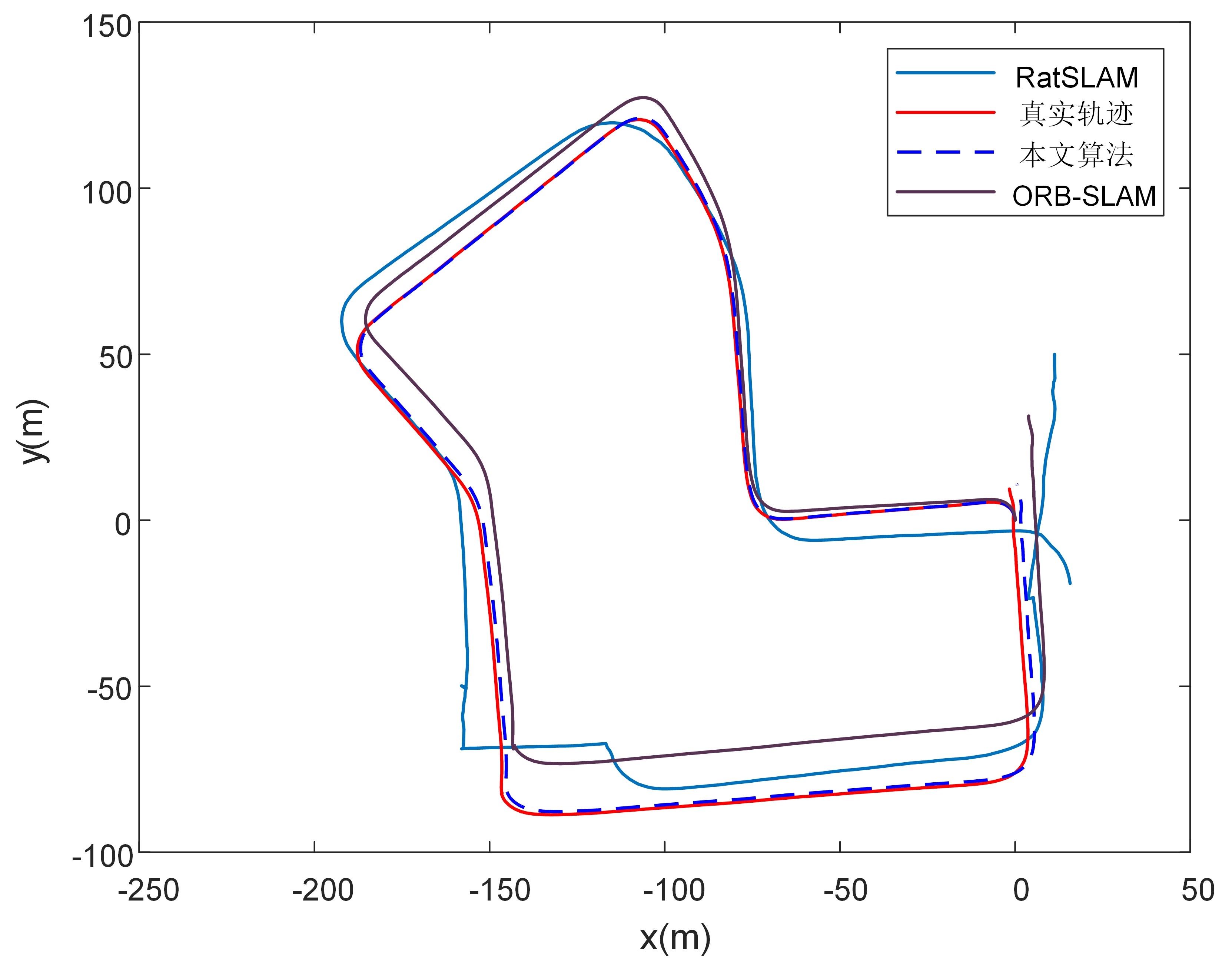
摘 要: 针对同步定位与地图构建(simultaneous localization and mapping, SLAM)过程中定位精度较低和角度漂移等 问题, 受哺乳动物海马体空间认知机理的启发, 提出一种构建多尺度网格细胞到位置细胞信息转换的仿生 SLAM 算 法. 首先, 引入头方向细胞和条纹细胞感知自身运动信息, 并生成多尺度网格细胞覆盖整个空间环境, 减小由于角度 偏移而产生的累计误差; 其次, 对于定位精度低问题, 采用 Hebb 学习规则下的竞争型神经网络建立多尺度网格细胞 到位置细胞的信息转换关系; 最后, 构建位置细胞与空间环境中不同地标的映射关系, 通过选取最大放电率的位置 细胞形成空间认知拓扑地图, 实现移动机器人的自主定位. 与 RatSLAM 和 ORB-SLAM2 在 KITTI 公开数据集上进行 对比实验, 结果表明, 所提算法能够通过对位置信息进行编码实现未知环境中的自主定位和建图, 同时, 控制平移误 差不超过 1.50 m, 旋转误差不高于 1.0°.
关键词: 认知地图; 路径整合; 位置细胞; 网格细胞; 定位精度
全文下载:基于多尺度网格细胞到位置细胞的仿生 SLAM 算法.PDF
部分实验结果展示: